
TimberMatic Maps を使用すると、オペレーターは伐採現場の生産状況をリアルタイムで確認できます。ハーベスターのセンサーによって収集されたデータと伐採された木材の正確な GPS ベースの位置は、フォワーダーのオペレーターが使用できるように、ハーベスターから TimberMatic Maps アプリケーションに自動的に送信されます。
TimberMatic のアップデートで Maps に新たな自動機能が追加
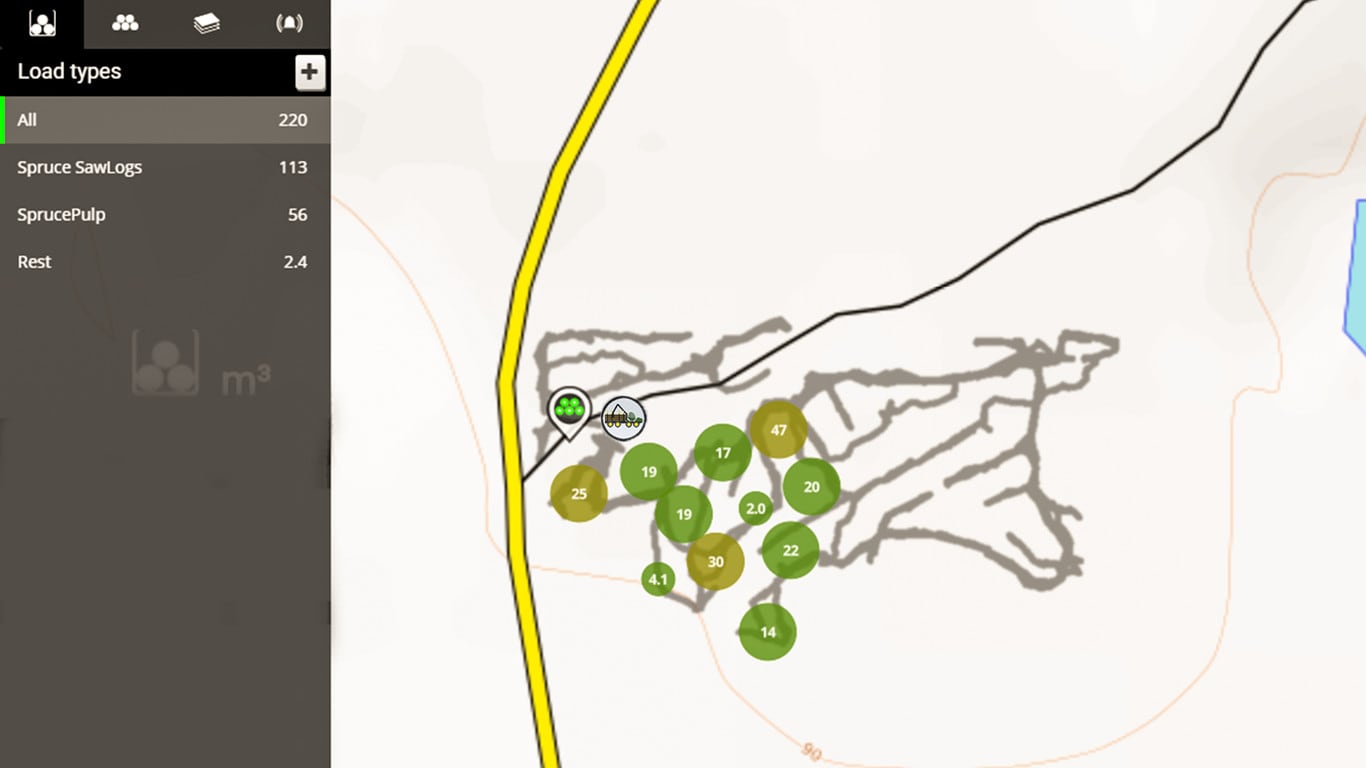
TimberMatic Maps には、丸太の配置や位置、現場での作業の進捗状況が表示されます。

丸太の配置と位置
TimberMatic Maps は、地上の丸太の配置と位置に関する視覚情報をオペレーターに提供します。TimberMatic Maps には、丸太が軌道のどちら側にあるかも表示されます。ハーベスターに IBC 3.0 が搭載されていない場合、丸太は点で表示されます。

AutoCollect – 積荷の自動登録
マップには、積載されるさまざまな木材の位置と量が表示されます。積荷が運搬されると、進行状況がマップ上で自動的に更新され、積み終わった木材はマップから消えます。

更新されたツール
マップには使いやすくするための改良が随所に施されています。生産ビューでは、完成した生産物のうち、腐朽材、繊維材、製材用材のどれがどの程度の割合を占めているかが表示されます。

伐採現場を可視化
機械間のデータはクラウドサービスを介して更新され、同じ作業現場で働くオペレーター全員が、すべての樹種とその組み合わせについて、個々の丸太に至るまでの走行ルートも含めて確認できます。
現場計画
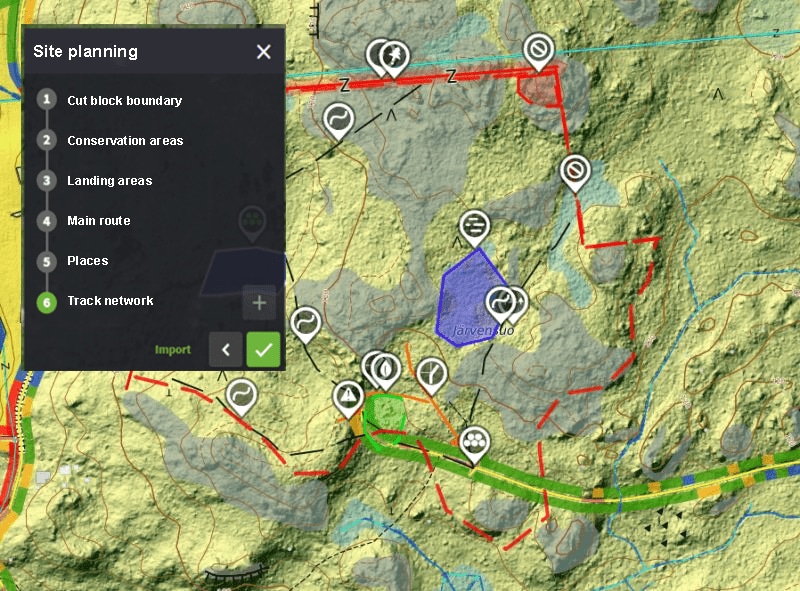
現場計画ツール
TimberMatic Maps プログラムに含まれる現場計画は、TimberManager で作成された伐採計画の使用を支援します。既製の計画がない場合は、TimberMatic Maps プログラムで直接作成することもでき、現場計画により詳細なガイダンスが得られます。TimberMatic Maps でエリアが描かれると、作業現場全体の木材の品揃えと総量を確認できます。
荷揚げ場の適切な計画と、各種木材の生産タイミングをより正確にすることで、生産と物流のプロセス全体を合理化することが可能になります。機械の可用時間が増加し、ハーベスターのオペレーター自身の作業計画が容易になります。軌道ネットワークが事前に十分に計画されていれば、走行距離と燃料消費量は減少し、自然に囲まれた現場の視認性も高まります。
ツールのガイド付き計画フェーズは、機械オペレーターの作業計画を支援します。これにより、作業が迅速になり、伐採の質が向上します。
現場計画のフェーズ
1.伐採ブロック境界
- マップ上に点を追加して、伐採ブロック境界を描画し、ハサミで穴を開けることができます。1 つまたは複数の区域を描画できます。
2.保護区域
- 伐採から保護すべきエリアに、マップ上で点、線、またはエリアとしてマークを付けることができます。
3.荷揚げ場
- マップ上の点、線、またはエリアを選択して、丸太を保管するエリアにマークを付けることができます。
4.主要ルート
- マップ上に点を追加して、伐採ブロックと荷揚げ場の間、および伐採ブロックを横切る主要ルートの候補を描画できます。
5.場所
- 安全上注意すべき場所、困難な地形などに、マップ上で点、線、またはエリアとしてマークを付けることができます。
6.軌道ネットワーク
- フリーハンドの描画ツールを使用して、伐採ブロック内の軌道の候補を描き込むことができます。

品揃えを強調表示し、ルートまたはエリアを選択し、自然スポットをマークします
すべて展開すべて折りたたむ
これらの機能は機械オペレーターを支援し、生産性を向上させます。
品揃えのハイライト
![]() 異なる種類の木材が混在している場合、木材にお気に入りマークを付けることで、異なる色で強調表示することができます。これにより、オペレーターは積載スペースで混在した木材を区分けし、すでに区分けされた状態で積荷を積み上げることができます。その結果、荷降ろしが大幅にスピードアップします。
異なる種類の木材が混在している場合、木材にお気に入りマークを付けることで、異なる色で強調表示することができます。これにより、オペレーターは積載スペースで混在した木材を区分けし、すでに区分けされた状態で積荷を積み上げることができます。その結果、荷降ろしが大幅にスピードアップします。
積載スペースで利用できるソーターがあれば、混合積載の荷下ろしが容易になり、生産性が大幅に向上します。
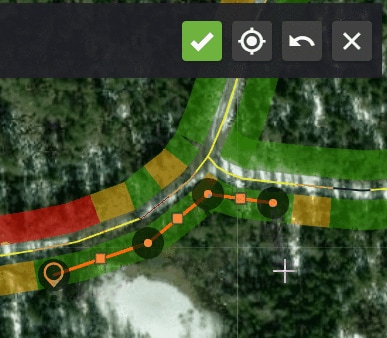
ルート選択
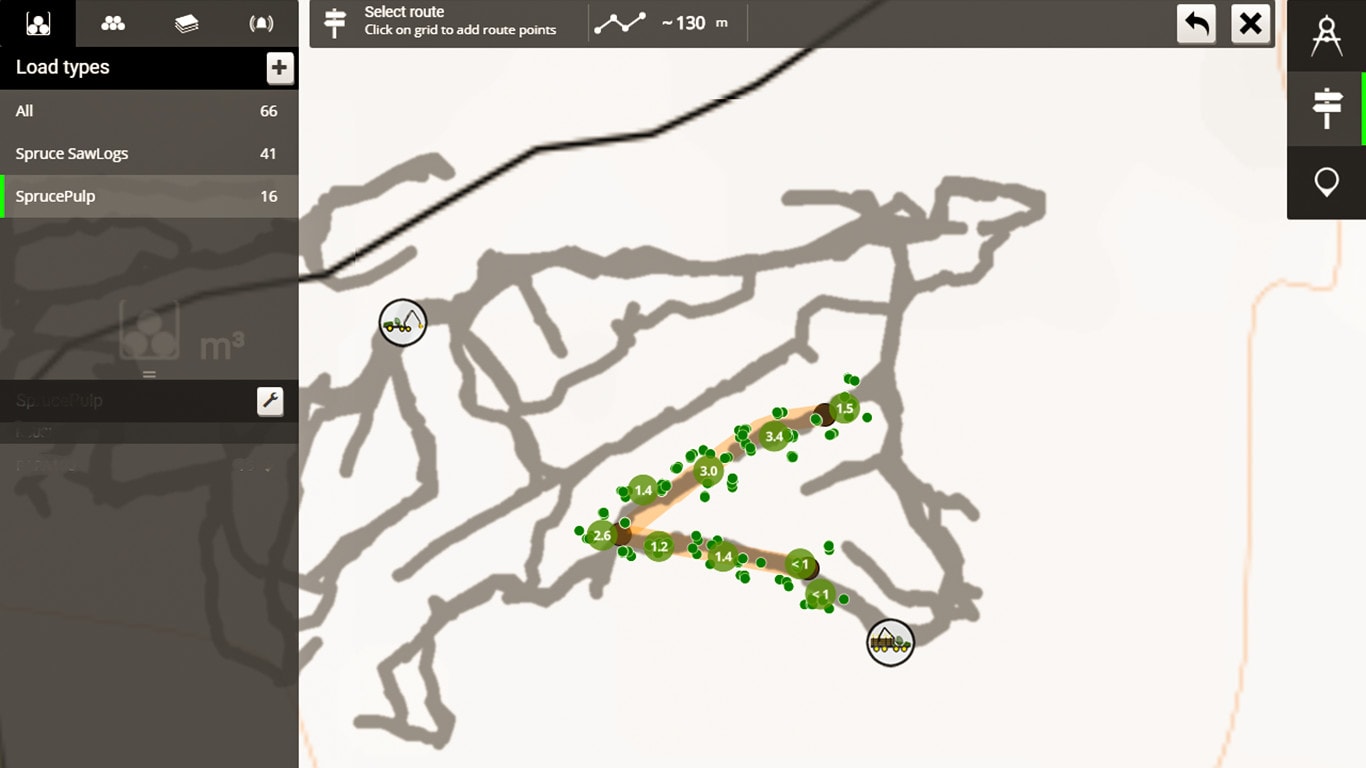
![]() ルート選択ツールを使用して、幅 10 m のルートを選択できます。また、さらに幅の狭いルートの選択も可能になりました。
ルート選択ツールを使用して、幅 10 m のルートを選択できます。また、さらに幅の狭いルートの選択も可能になりました。
選択ツール
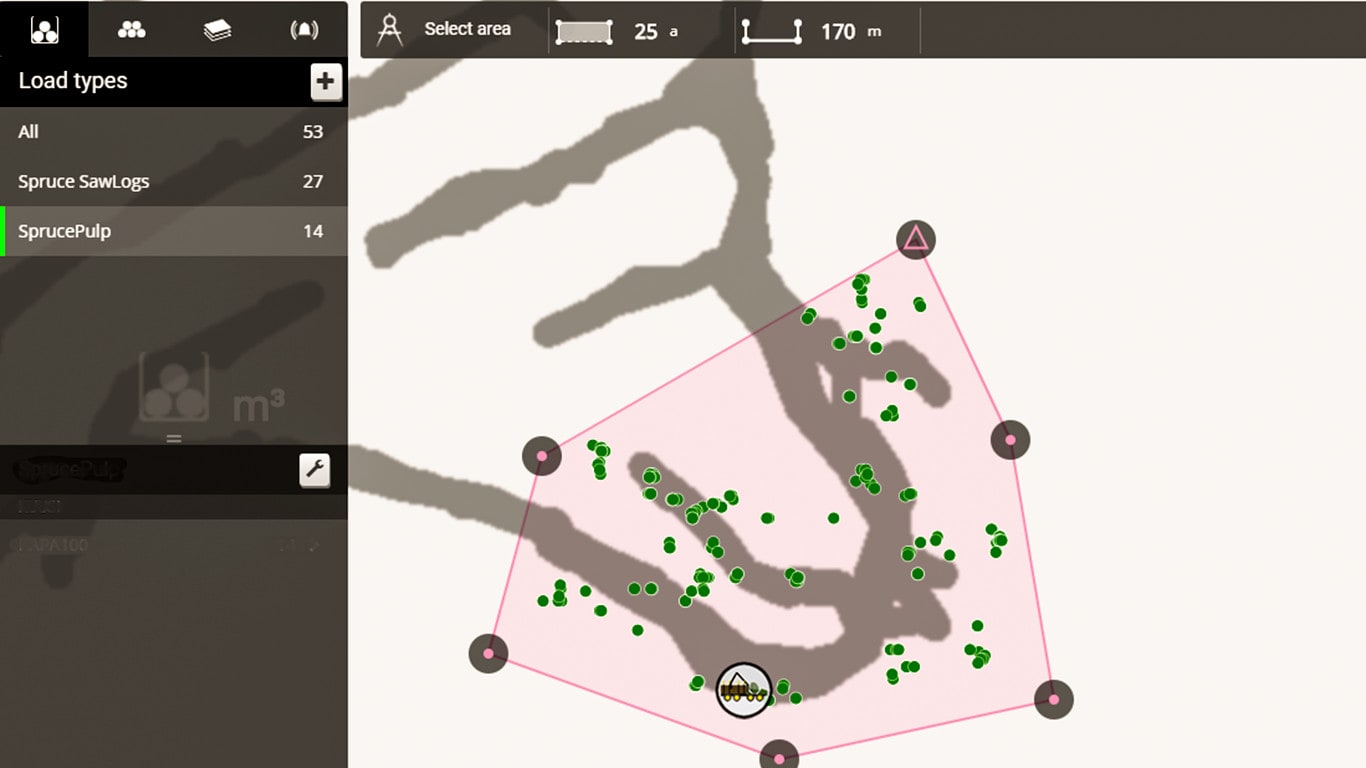
 選択ツールを使用して、さまざまな大きさのエリアを選択できます。手のアイコンからの距離は拡大または縮小でき、消しゴムツールでエリアを編集できます。走行ルートを記録することもでき、誤って余分な丸太を記録してしまった場合は、消しゴムで修正することもできます。
選択ツールを使用して、さまざまな大きさのエリアを選択できます。手のアイコンからの距離は拡大または縮小でき、消しゴムツールでエリアを編集できます。走行ルートを記録することもでき、誤って余分な丸太を記録してしまった場合は、消しゴムで修正することもできます。
直接収集してアップロードする
 丸太を収集してシステムに直接アップロードすることができ、さまざまな種類の木材の量を簡単に確認できます。在庫履歴も記憶されます。
丸太を収集してシステムに直接アップロードすることができ、さまざまな種類の木材の量を簡単に確認できます。在庫履歴も記憶されます。
生態学的に敏感な地域または危険な地域を避ける
 伐採現場に、池、急斜面、泉、小川、場合によっては送電線など、注意すべきエリアがある場合、ハーベスターのオペレーターはマップにコメントを添えてそのエリアにマークを付けることができます。必要であれば、コメントにアラートを追加することも可能です。これにより、フォワーダーのオペレーターがそのエリアに近づくと通知が送信されます。
伐採現場に、池、急斜面、泉、小川、場合によっては送電線など、注意すべきエリアがある場合、ハーベスターのオペレーターはマップにコメントを添えてそのエリアにマークを付けることができます。必要であれば、コメントにアラートを追加することも可能です。これにより、フォワーダーのオペレーターがそのエリアに近づくと通知が送信されます。
TimberMatic Maps は、伐採現場を視覚化するツールです。このアプリケーションにより、機械同士のチームワークが明確になり、強化されます。オペレーターとコントラクターは、作業現場の進捗状況をリアルタイムで確認できます。
オペレーターは、搬送した木材に、保管エリアに搬送済みのマークを付けます。これにより、次のシフトのオペレーターは、どこで作業を開始すればよいかが分かります。木材量の見積もりは不要で、暗い森の中でも丸太は 1 本も残りません。たとえ雪で覆われていても、さまざまな種類の木材が、丸太 1 本に至るまでマップ上に表示されるからです。
フォワーダーのオペレーターは、特定のエリアから、または伐採ルートに沿って、希望する種類の木材を選択でき、マップには、選択したエリア内にあるその木材の正確な量が表示されます。オペレーターは、マップ上の特殊なエリアにマークを付けることもできます。こうすることで、走行ルートを計画する際に軟弱地盤などを避けることができます。
このマップには、伐採ルートネットワークによって、1 本の丸太に至るまですべての種類の丸太が表示されます。作業と最適な運転ルートの計画は非常に簡単です。
精密伐採
John Deere Forestry の精密伐採ソリューションは、生産的で効率的かつ持続可能な林業に向けて、林業機械会社やオペレーターを支援する先進技術を市場に送り出しています。TimberMatic Maps と TimberManager は、各機械のコアテクノロジー機能を拡張して、パワフルな新しい可能性を解き放ちます。さらに、作業現場とバックオフィスでの業務を合理化します。